起止时间:03/2026 ~ 04/2026
技术栈:[ROS2, Rviz, yoloV8, Piper, Orbbec, CAN, VLA, ACT, Diffusion Policy]
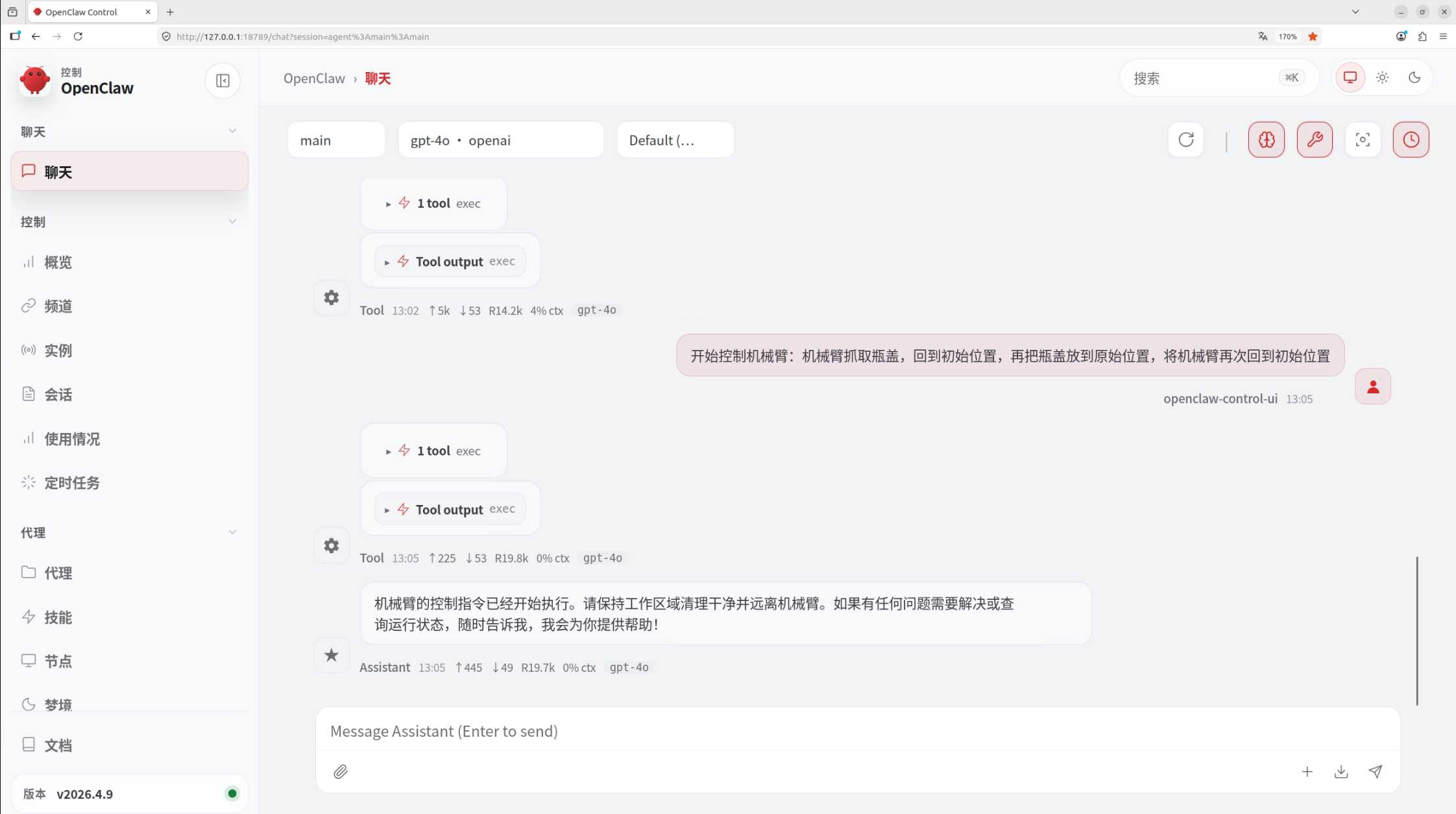
基于 OpenClaw Skill 框架,构建了一个由 Agent 驱动的视觉引导机械臂抓取系统,实现了从感知、决策到执行的端到端闭环控制。
🧩 系统完整能力拆解
1. Agent 控制层(小龙虾)
- 基于 Agent(你说的“小龙虾”)作为决策中枢
- 负责任务理解 + 调用 Skill
- 实现:
“看见 → 理解 → 决策 → 执行”
👉 本质:
AI 在调度机器人能力(具身智能雏形)
2. Skill 执行层(OpenClaw 框架)
- 使用 OpenClaw 定义 Skill
- 将机器人能力模块化:
视觉 Skill
抓取 Skill
运动 Skill - 特点:
可组合
可扩展
支持 Agent 调用
3. 视觉感知(Perception)
- YOLO 目标检测
- 实时识别目标(cup / bottle 等)
- 输出类别: bounding box
4. 空间定位(3D理解)
- 深度相机获取距离信息
- 计算:像素坐标 → 相机坐标系
5. 手眼标定(关键能力)
- 完成:
相机坐标系 → 机械臂坐标系 - 作用:
解决“看见 ≠ 抓得到”的核心问题
6. 抓取优化(PSO)
- 使用 PSO(粒子群优化)
- 对抓取点 / 抓取姿态进行优化
- 提升:
抓取成功率
稳定性
7. 机械臂控制(执行层)
- 基于 SDK 控制机械臂运动
- 完成:
轨迹执行
抓取动作
8. 系统闭环
用户/任务
↓
Agent(小龙虾)
↓
Skill调用(OpenClaw)
↓
视觉感知(YOLO + 深度)
↓
坐标计算 + 手眼标定
↓
PSO优化抓取点
↓
机械臂执行抓取

 OpenClaw
OpenClaw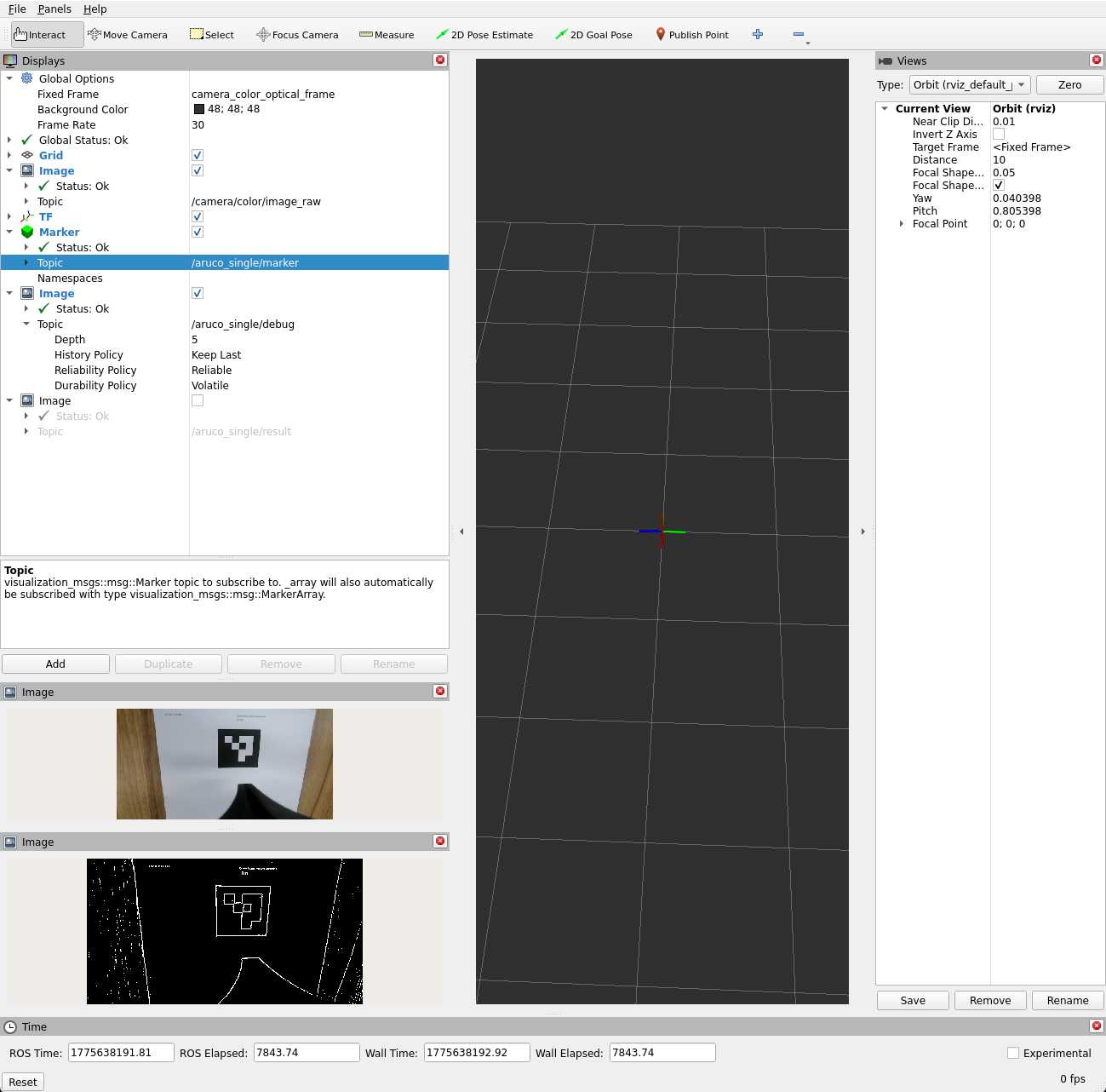 handeye calibration ros,手眼标定法
handeye calibration ros,手眼标定法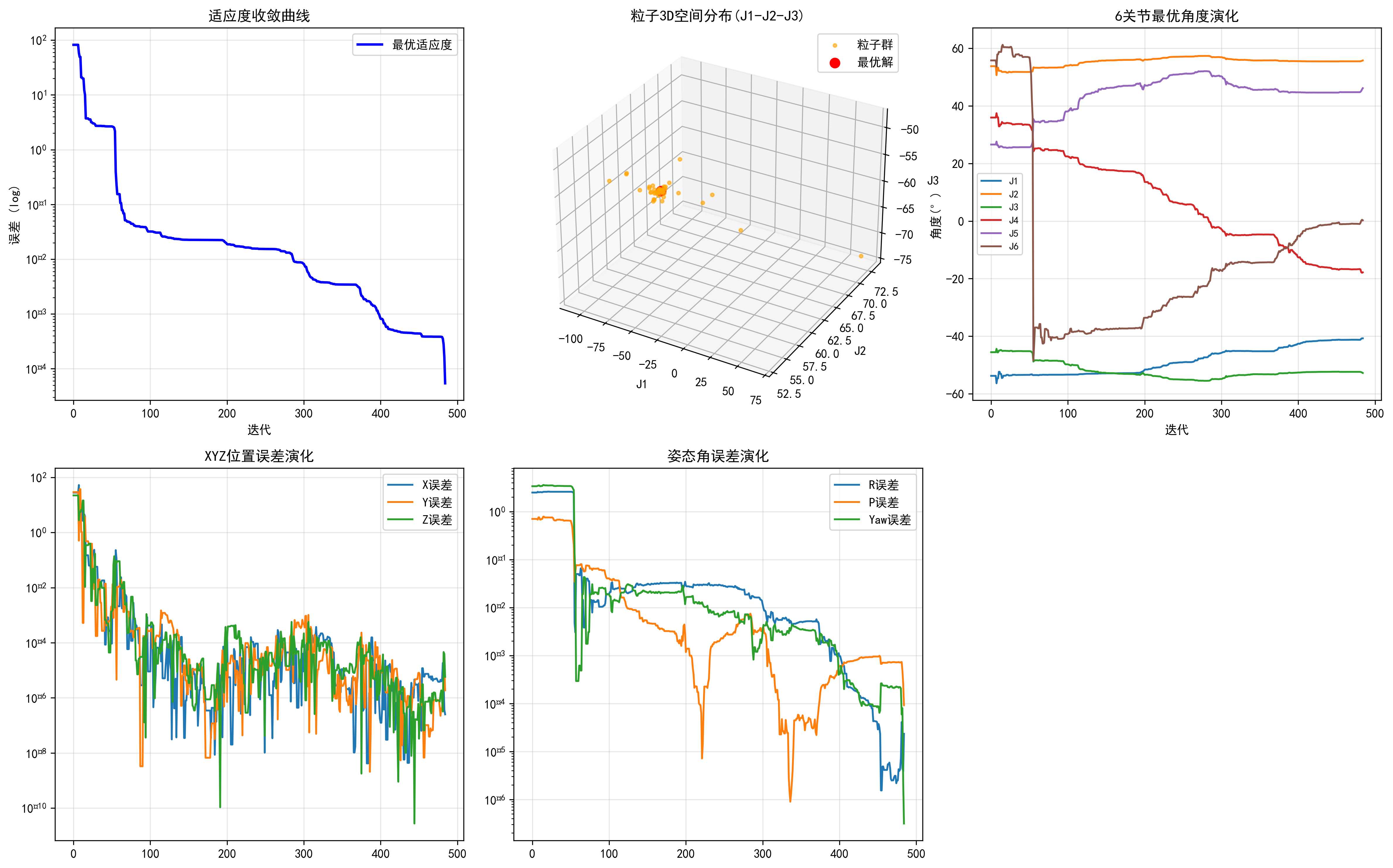 Particle Swarm Optimization,粒子群优化算法
Particle Swarm Optimization,粒子群优化算法
- 本文链接: https://jinhongcai.work/2026/04/15/robotics/openclaw_piper/
- 版权声明: 本博客所有文章除特别声明外,均默认采用 CC BY-NC-SA 4.0 许可协议。