起止时间:11/2025 ~ 12/2025
技术栈:[GUI, LLM, DeepSeek-V3.2-Exp, IK, PinkIK, DLS, WebSocket, Isaac Sim, usdf, usd]
全链路打通 + 实时交互 + 大模型规划 + 逆运动学IK算法 + 自动意图识别 + 串行序列生成 + GUI + WebSocket + IK
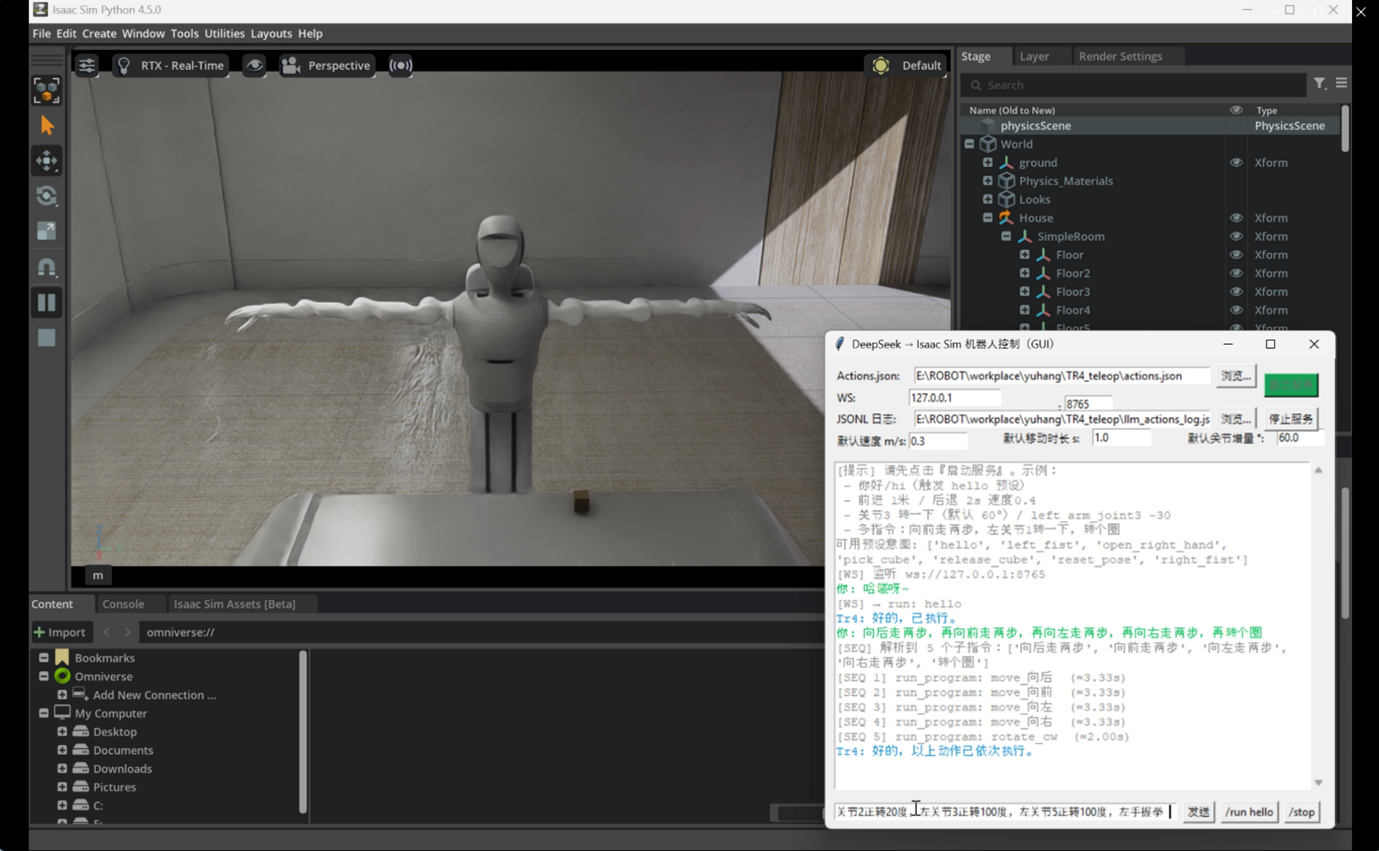
该项目是面向具身智能的全链路机器人控制系统,集成 GUI、自然语言理解、大模型规划(DeepSeek-V3.2-Exp)、语义解析、动作模板匹配、多动作自动分解、队列化动作序列生成、PinkIK+DLS 逆运动学融合求解、抓取三维偏移、自适应轨迹规划、WebSocket 实时闭环控制与 Isaac Sim USD/USDF 仿真等核心模块。系统从一句自然语言开始,通过参数抽取、意图识别与动作结构化自动生成可执行的多段动作 schema;并在 IK 层实现对抓取、握拳、避障和动态偏移的自适应求解,最终以毫秒级同步执行与状态回传完成“自然语言 → 语义动作 → 序列规划 → IK 求解 → 真实执行 → 环境反馈”的完整闭环。该系统展示了面向具身智能的工程级实现能力,实现了人机交互、规划、控制与仿真全链路贯通。
1. GUI 输入模块
- 支持自然语言输入
- 支持复合动作指令输入
- 支持预设动作
- 支持生成机器人动作策略
- 支持自动化解析动作成JSON结构
2. 语义解析与动作分解模块
- 一句话 → 多动作
- 自动分句 → 动作意图识别
- 自动提取参数(步数、角度、方向、位置)
- 判断是否在预设模板 or 需要自由生成
3. 动作序列生成模块
- 自然语言 → 多段动作序列
- 建立 Queue 串行执行
- 动作包含角度、轨迹、持续时间、约束
4. IK 与轨迹规划融合模块
- PinkIK 与 DLS 的结合
- 三维偏移(握拳 vs 拿方块)
- 抓取阈值 radius
- 物体接触判断
- 基于语义目标的 IK 自适应轨迹规划
5. 机器人执行模块
- WebSocket 指令下发
- 强同步与反馈
- 支持中断、返回、失败处理
- 行为封装为 schema
6. 环境反馈循环
- Sim 更新状态
- 判断物体是否抓取
- 判断路径是否稳定
- 自动处理 action completion
- 向 GUI 回传状态
- 完整闭环系统
- 本文链接: https://jinhongcai.work/2025/11/19/robotics/tr4_humanoid/
- 版权声明: 本博客所有文章除特别声明外,均默认采用 CC BY-NC-SA 4.0 许可协议。